

 Project name: Animal and robot Societies Self-organise and Integrate by Social Interaction (bees and fish)
Project name: Animal and robot Societies Self-organise and Integrate by Social Interaction (bees and fish)
Project acronym: ASSISIbf
Dates: 01.02.2013 - 31.07.2018
Total budget: 6 Million EUR
Funding: EU-FP7
Grant Agreement number: 601074
website: zool33.uni-graz.at/artlife/assisibf
ASSISIbf
The main goal of ASSISIbf is to establish a bio-hybrid society of robots and animals (honeybees and fish). Within the project, two novel robotic systems were developed, with built-in abilities to “learn” the social language of animals, and to influence their collective behaviour.
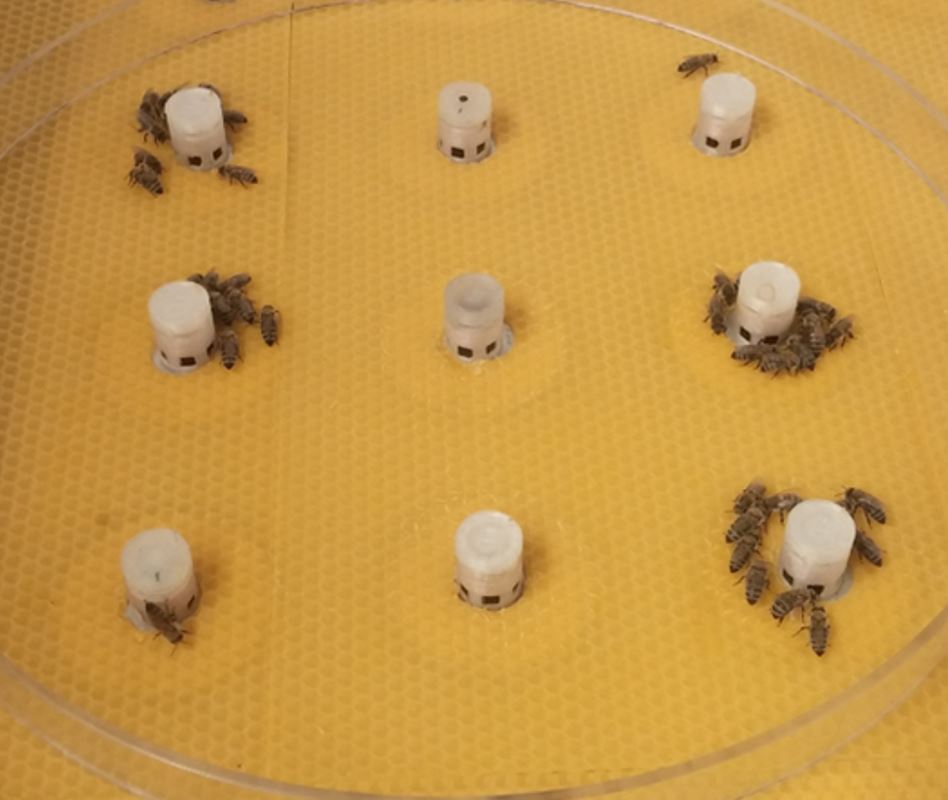
A network of static interactive robot units called CASUs (Combined Actuator Sensor Unit) was developed, capable of producing and sensing a variety of stimuli relevant for honeybee behaviour. The robots implemented into the experimental arena are shown in the figure.

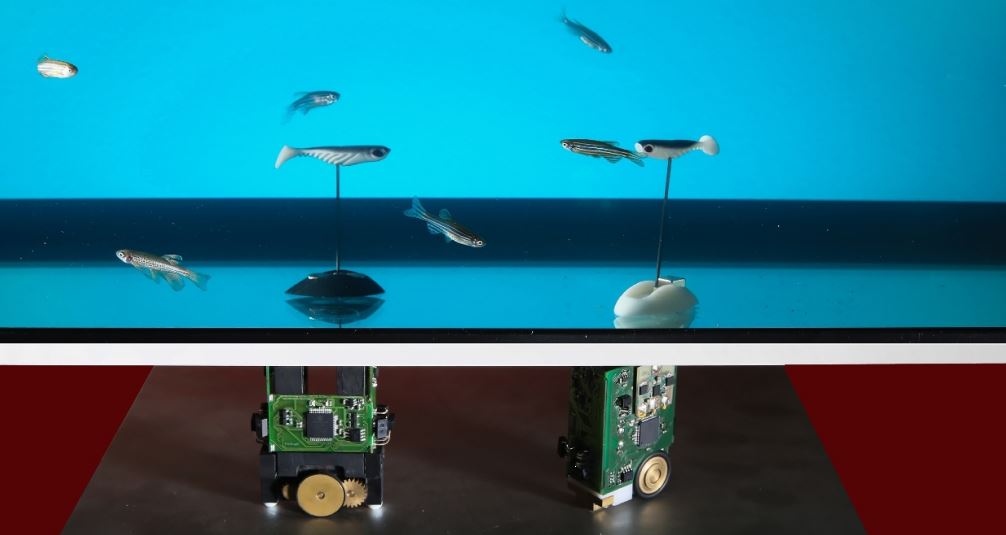
Fish CASUs are designed as mobile robots capable of performing complex dynamic movements and mimicking the intricate behaviour of small live fish species in constrained workspaces.
Distributed control methods using evolutionary computation were developed for the robotic systems, adapting robot behaviour to the observed animal behaviour, thus enabling the establishment of a self-organising bio-hybrid society of robots and animals. Such a society can then then pursue a common goal, which can be defined by human “users” of the system. One of the showcase examples is a graph theory problem solver (dominating set), where animals and robots, enhanced with a human-designed decision algorithm, together search the solution space, yielding a close-to-optimal solution in constant time.

This project is developed by:
- University of Graz – Artificial Life Lab (AT)
- CYBERTRONICA - Research Center of Advanced Robotics and Environmental Science (CH)
- University of Zagreb – Faculty of Electrical Engineering and Computing, LARICS (HR)
- Université Paris Diderot – LIED (FR)
- École Polytechnique Fédérale de Lausanne – LSRO (CH)
- FCiências.ID – Associação para a Investigação e Desenvolvimento de Ciências (PT)
Prof. Stjepan Bogdan attended on the 7th ASSISI General Assembly meeting in Lisbon, held on October 26th, 2016. Prof. Bogdan presented the work done by LARICS team, including the developed interactive arena, visual bee tracking software, bee density estimation by neutral network and results obtained in the successful cooperation between honeybee society and multi-agent system based on consensus algorithm.