

 Project name: Structured Ecological CULtivation with Autonomous Robots In Agriculture
Project name: Structured Ecological CULtivation with Autonomous Robots In Agriculture
Project acronym: SPECULARIA
Dates: 01.06.2018 - 31.05.2023
Total budget: 1,794,905.62 HRK
Funding: Croatian Science Foundation (HRZZ)
Project number: UIP-2017-05-4042
Website: http://specularia.fer.hr/
SPECULARIA
This project deals with concepts of compliant robot control, soft robotics, and heterogeneous robotic systems and utilizes them to help farmers in indoor organic agriculture.
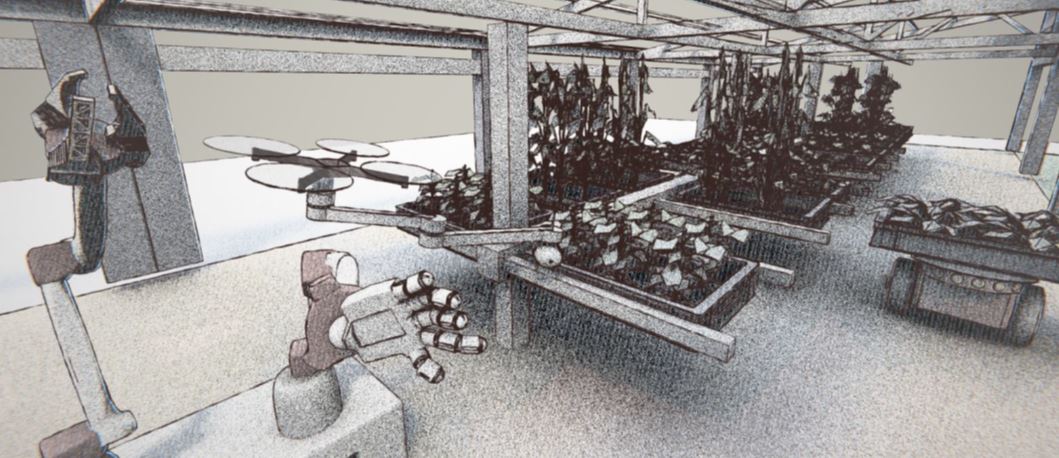
The main goal is to develop a heterogeneous robotic system comprised of three agents: an Unmanned Aerial Vehicle (UAV), Unmanned Ground Vehicle (UGV), and a compliant multi-degree-of-freedom manipulator. The UAV is equipped with a lightweight multi-degree-of-freedom manipulator carrying sensors for plant surveillance. The manipulator enables the UAV to fly outside the danger area, where its prop wash wind gust can damage the plant. The UGV is equipped with a mechanism that allows it to transport growth unit containers, which are the smallest organization unit within the farm, consisting of a single or variety of plants. The compliant manipulator’s task is to perform delicate handling of plants, such as flower and fruit manipulation, and plant pruning. Each robot has a specific set of abilities, but when put to work together, they can be applied to achieve versatile goals in an unstructured environment, which an indoor organic farm most certainly is.

UAV with manipulator for inspection
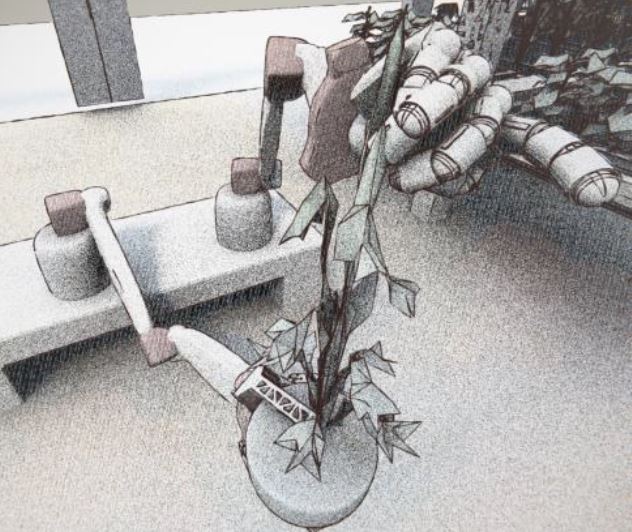
Compliant manipulator for plant treatment

UGV for container transport
News
Instead of the annually held University of Zagreb Fair and Doors Open Day at UNIZG FER, this year the event had a special edition. The alternative Windows Open Days featured a programme that was streamed via MS Teams. UNIZG-FER's “windows” were open from November 19 to 21, 2020. LARICS also participated in the programme within the session Introducing projects - Ask professors what you want to know about robotics. LARICS members presented the lab, their activities, robots, and projects, including SPECULARIA. The extensive programme is available in the form of videos at https://smotra.fer.unizg.hr/
Daily newspaper Vecernji list visited Specularia project team to discuss the impact of the implementation of 5G on both the global and domestic economies, in which exceptional speed of information, communication and services are becoming possible. Project Coordinator Matko Orsag and Specularia researchers explained how 5G technology will enable innovation and the implementation of ideas into reality, and their robots will finally be able to talk to each other and make decisions all the time.
Full article (in Croatian) available here.
The 2020 IEEE International Conference on Multisensor Fusion and Integration (MFI 2020) was held from 14th to 16th of September 2020 virtually. MFI 2020 is an international conference sponsored by the IEEE Robotics and Automation Society (RAS) and the IEEE Industrial Electronics Society (IES). LARICS' PhD student Bruno Maric virtually presented a scientific paper:
B. Maric, M. Polic, T. Tabak, M. Orsag, "Unsupervised optimization approach to in situ calibration of collaborative human robot interaction tools"
Project Coordinator Matko Orsag gave an interview for the Croatian daily newspaper Jutarnji list on current research and innovations the Laboratory for Robotics and Intelligent Control Systems has been working on, plans for the future and general outlook on the role of robots and the way that have already started affecting everyday living.
The interview (in Croatian) is available here.
On 2 January 2020, Croatian daily newspaper Jutarnji list published an article on project Specularia (Structurized Ecological Cultivation with Autonomous Robots in Indoor Agriculture). Project team members Ivana Mikolić, Bruno Marić, Antun Ivanović, Matko Orsag and Marsela Polić explained in a nutshell the objectives of the project and its scientific, technical and implementational aspects.
- Robotic systems can help small farms with farmland that is difficult for a family to cultivate. One of agricultural critical issues is lack of workforce, young people interested in ariculture. Robotics is a lifeline for our economy, said Project Coordinator Dr. Matko Orsag.
You can read the article (in Croatian) here.
Matko Orsag and Marsela Polic went to Macao (China) to attend another International Conference on Intelligent Robots and Systems (IROS 2019). Marsela Polic presented a paper titled “Convolutional Autoencoder for Feature Extraction in Tactile Sensing”, co-authored by Matko Orsag, Ivona Krajacic and Nathan Lepora. LARICS members were in China from 2nd to 9th November 2019 and actively participated in the Conference.
The paper titled Centroid vectoring control using aerial manipulator: Experimental results was presented by Antun Ivanović at the international conference IEEE International Conference on Unmanned Aircraft Systems within projects Specularia and AeRoTwin. The conference was held 11-14 June 2019 in Atlanta, USA.
This paper addresses the issues of aerial manipulation and its dynamic center of mass variations by deriving a control principle capable of exploiting this disturbance as a means to stabilize the UAV. The UAV utilizes both rotors variations and centroid vectoring for attitude control and the control structure was further augmented with position control. The main focus is on experimental validation of the system.
On 20 May 2019, during the Croatian Academy of Engineering (HATZ) General Assembly, LARICS team member and Asst. Prof. Matko Orsag was awarded a Young Scientist Award "Vera Johanides", which is a recognition of his rich contribution to science and the field of engineering - We would like to congratulate our colleague on his success and wish him even more success in the future!
On 24 April 2019, members of LARICS working on our Specularia project went to Agrivi, a company applying the newest software and technological innovations to agriculture. Matko, Ivana, Antun and Marsela talked to them about which agricultural crops and cultures they should use as part of the project and which activities can be done with the individual plants in their various stages of growth. They also learned a lot about Agrivi's work and how they use these innovative technologies, which they could also apply to the project in a number of ways.
Asst. Prof. Matko Orsag was invited to be a speaker in the panel discussion titled "The Future of Agriculture in the EU" organized by the Economics Clinic (Ekonomska klinika) as part of the "My voice in the EU" ("Moj glas u EU") event, held on 24 and 25 April 2019 in Zagreb. Together with other speakers at the panel discussion, he talked about his research field, particularly the Specularia project and the application of robotics in agriculture, as well as about future plans, trends and expectations in agricultural sciences and practical applications. Together the speakers answered the listeners' questions. More info on the event can be found here.
LARICS' Matko Orsag took part in the Zagreb Energy Congress - ZEC 2019, organized by the IEEE Student Branch University of Zagreb on 10-14 April, 2019 at our Faculty. He held a lecture titled "Robots in Service of Human Kind" during the Academy Day of the event and told the attending students and listeners about what robots are doing for humans and what they could potentially do in the future, particularly in relation to agriculture and our Specularia project, but also in relation to the energy sector. LARICS was a silver sponsor of this event. You can read the lecture abstract and see a few pictures in the detailed news.
Members of our lab went to Bucharest, Romania, on 19 to 24 March, to take part in the European Robotics Forum 2019 to represent the robotics@fer.hr brand, which includes three robotics laboratories from the University of Zagreb Faculty of Electrical Engineering and Computing: LARICS, LABUST and LAMOR. There they took part in lectures and workshops, presented their work and some of the laboratories' robots and brought our work closer to the public and the robotics community.
Our Asst. Prof. Matko Orsag went to Čakovec, Croatia, on 28 February 2019 to take part in an conference on agriculture titled "Managing knowledge in agriculture" ("Upravljanje znanjem u poljoprivredi" in Croatian), where he attended lectures, met experts in this area, and presented the Laboratory's project Specularia. As the Coordinator of the project, Matko talked about the use of robotics in agriculture and its potential future impact and uses in this field of economy and everyday life.
On Wednesday, 19th December, we held a fund-raising event for the Autism Association Zagreb, where the robots from our Laboratory worked together to serve the visitors with chocolate waffles, brownies and tea or mulled wine. This exciting event was visited by over 2000 people and some 700 orders were taken and served, which resulted in the amazing amount of over 13 thousand kuna (almost €2000) in donations, all of which will be given to the Autism Association Zagreb. We would like to give our gratitude to everyone who took part in this great event and wish everyone happy holidays!
The famous Christmas market in Zagreb has just become one interesting event richer: On Wednesday, 19th December, 10-16h, visitors of UNIZG-FER will have the opportunity to enjoy mulled wine, tea and brownies or waffles, which are special because they will be served by - robots! This unusual event is organized by us and the brand robotics@fer.hr with the goal of raising funds for the Autism Association Zagreb. We hereby invite you to join us at this unusual and exciting event!
Our new robotic arm for the project Specularia has recently arrrived at our Lab! This is great news for the project, as it means that our colleagues will now be able to continue working on new research and ideas. This compliant multi-degree-of-freedom manipulator has the task of performing delicate handling of plants, such as flower and fruit manipulation, and plant pruning. It will work together with two more robots in a robotic system which consists of the arm, an Unmanned Aerial Vehicle (UAV) and an Unmanned Ground Vehicle (UGV). Together, they will be able to accomplish many things!
On 15th October, prof. Stjepan Bogdan and Matko Orsag presented five new projects developed in our Lab at a scientific symposium “New research projects at UNIZG-FER”. They have presented recently started projects: AeRoTwin, ENCORE, MBZIRC, SPECULARIA, and ENDORSE. At the symposium, the emphasis was put on possibilities of cooperation with economic operators as well as job opportunities on projects from young professionals and experienced researchers.
The project Structured Ecological CULtivation with Autonomous Robots In Agriculture - SPECULARIA is a new five-year-long project that deals with concepts of compliant robot control, soft robotics, and heterogeneous robotic system and utilizes them to help farmers in indoor organic agriculture. The project is sponsored by the Croatian Science Foundation. The project has started on June 1st, 2018.
In this project, a proposed heterogeneous robotic system has the potential to make the products of organic agriculture less expensive, and in turn more accessible to a wider population. The proposed system goes beyond the current state of the art, in a sense that it proposes a system comprised of small robots with specific abilities that can execute certain tasks only when they are introduced to work together. The key issue in dealing with sensitive plants is to ensure the necessary compliance from the manipulator motion. This will ensure the robot can execute certain tasks without harming the plant. This requirement also fits within the Soft robotics paradigm, that focuses on researchers to build better sensing machines, capable of dexterous human-like motion. Testing the robots on such a challenging application, represents an interesting research opportunity that will certainly lead to new results in a rapidly expanding field of research.